つい最近、佐古前装備さんでジャンクPCを漁っていたらWindowsのタブレットPCを見つけました。
それがDellの Venue 8 Proです。
佐古前装備はパソコンやパーツ、周辺機器等を扱うお店でタブレットやスマホはめったに販売することがありません。
そのせいかタブレットの価格設定がバグっててジャンク価格でなんと1100円でしたw。
ちなみにジャンク理由はタッチパネルの反応がおかしいとのことです。
ヤフオクではあまり出ていませんでしたが、それでも1000円台の販売はそんなにないのでかなりお買い得です。
以前買ったジャンクのタブレットPCと同じ価格で有名メーカーのタブレットが買えるのはかなりラッキーな気がして迷わず買いました。
買った後に電源を入れてみたら普通に画面が映りました!(OSはWindows8.1が買ったときから入ってました)
そしてタッチパネルに関しては画面の縁の反応が悪いぐらいで大方の画面が普通に反応してたので悪くないです。
これでLinux突っ込んでもちゃんと動く気がします。
というわけで今回はこのタブレットにUbuntuを突っ込んでみます。
インストールメディアを起動しようとしたら…
以前タブレットにインストールしたときと同様にインストールメディアを起動しようとしたらめちゃくちゃ重くて結構イライラしましたw。
何度か再インストールしたりして試行錯誤して2、3日経過しましたがうまく行かなかったです…
というわけでUbuntuのインストールは断念してUbuntuよりも軽量な派生ディストリビューションのlubuntuをインストールしてみました。
lubuntuのインストール
インストールメディアの作成
まずはlubuntuのOSイメージをダウンロードすることにしました。
以下のリンクからLTSの20.04のダウンロードします。
OSのインストール
インストールメディアの作成手順は以下の記事の通りなので、割愛します。
Ubuntuの派生ディストリビューションで使用するイメージが違う程度なのでOSのインストールも同じ手順でやってもらえばOKです。
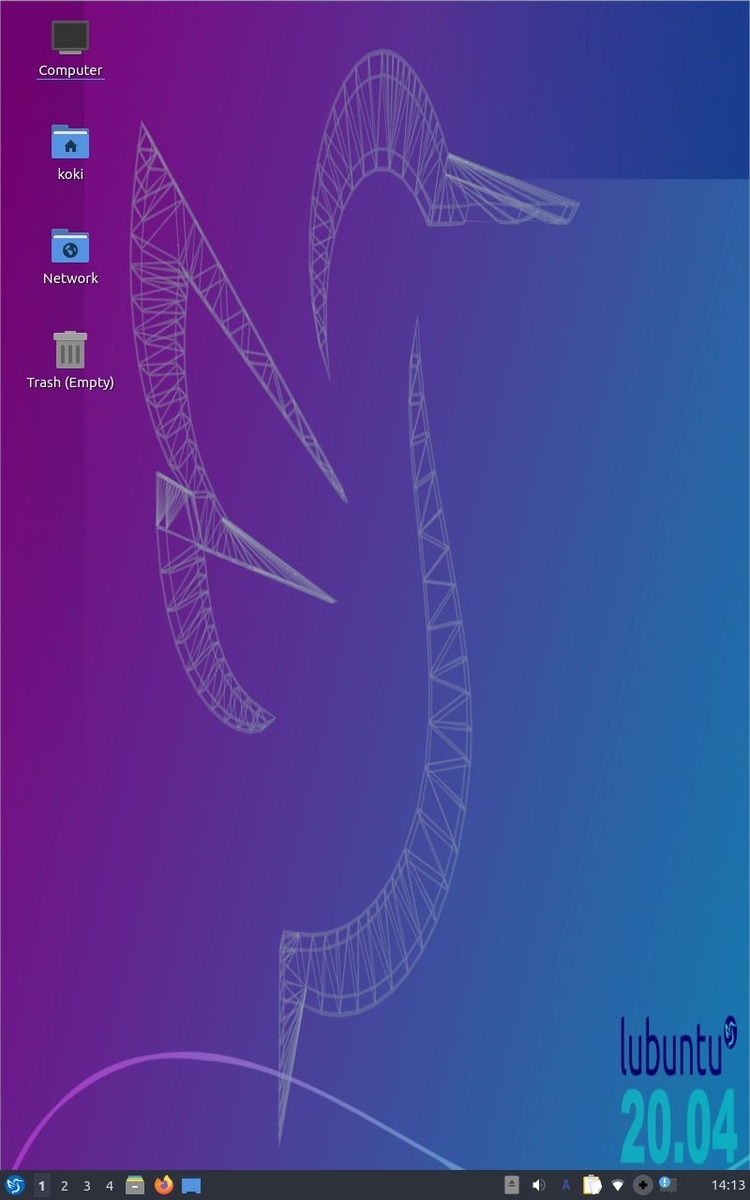
インストール完了したら、インストールメディアを外して再起動したら以下のようにデスクトップ画面が表示されたら成功です。
ROSのインストール
OSを入れたところで今度はlubuntuにROSを入れてみます。
インストールは以下のリンクの手順通りにできます。
Ubuntuの派生なのでUbuntuのときと同様の手順で大丈夫です。
Turtlesimを動かしてみる
それでは試しにTurtlesimを動かしてみます。
ワークスペースの作成し適当な名前のパッケージを作成します(今回はワークスペース名はcatkin_ws、パッケージ名はhelloworldとします)。
cd ~/catkin_ws/src catkin_create_pkg helloworld
helloworldディレクトリを開いて以下のlauchファイルを作成します(ファイル名はcontrol_turtle.launchとします)。
<launch> <group ns ="sim"> <node name="turtlesim" type="turtlesim_node" pkg="turtlesim"/> <node name="teleop_key" type="turtle_teleop_key" pkg="turtlesim" /> </group> <launch>
このlaunchファイルを実行して以下のようにturtlesimをteleopkeyで動かせるようになったらROSは正常に動作しています。
タブレットにrosつっこんでみたら意外と動くぞ!
— KMiura (@k_miura_io) 2022年3月28日
これをロボットのモニタリング端末にするんだ#rosjp pic.twitter.com/rfdAEig2Nb
まとめ
今回はジャンクのタブレットPCにROSを入れてみました。
以前のジャンクタブレットはタッチパネルが反応しなくて困っていましたが、今回のやつは特に特別なセットアップしなくてもタッチパネルがちゃんと反応してたので多分前回セットアップしたタブレットの調子が悪いだけということが分かりました。
ただ、今回のタブレットではUbuntuよりも軽量とはいえブラウザの挙動が固まったりして全体的に動作がもっさりしてたので、使い方に気をつけないといけないですね…
今後はこのタブレットでROSを動かしてちょっとしたロボットのモニタリングなんかやってみたいなと思います(処理落ちしないか心配ですが…)